
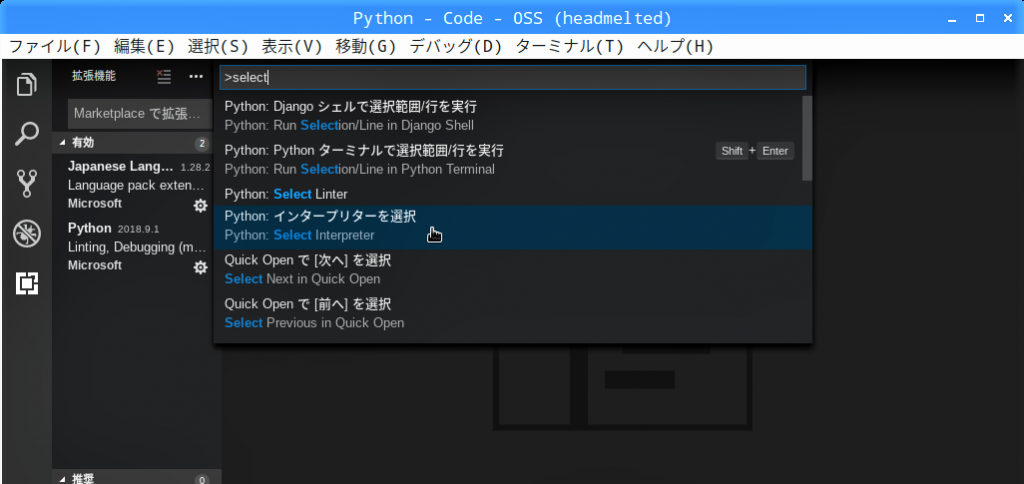







改訂【 日本語化 】Visual Studio Code
今回は英語版のVisual Studio Codeに拡張機能”Japanese Language Pack for VS Code”をインストールして日本語化する手順を紹介します。
改訂【 ワークスペースの設定 】Visual Studio Code
インストールしたVisual Studio Codeを日本語化したら、真っ先にワークスペースの設定を行います。その他の設定は、ここで設定したワークスペース毎に保存されます。
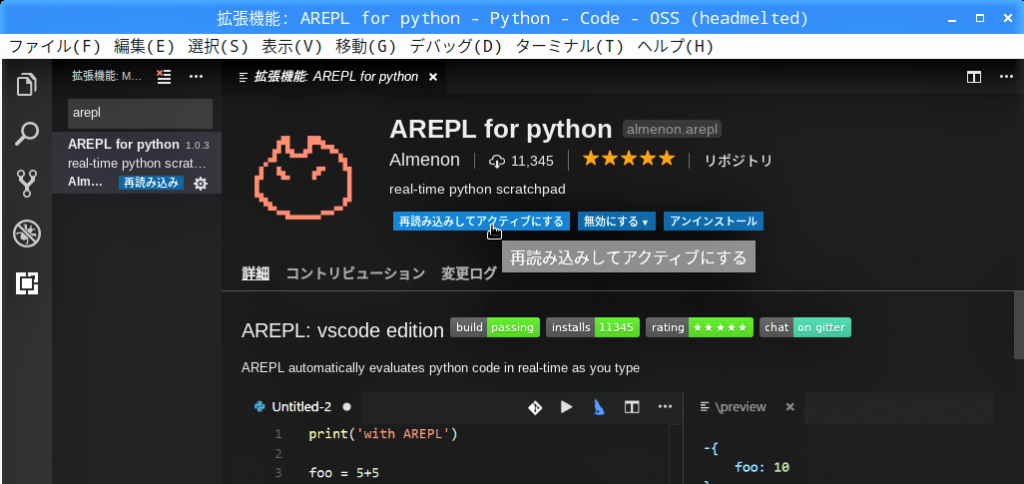
改訂【 リアルタイムデバッガーAREPL 】Visual Studio Code
Visual Studio Codeには便利な【 拡張機能 】がたくさんありますが、今回は、特に初心者に有益なリアルタイムデバッガー”AREPL for python”を紹介します。
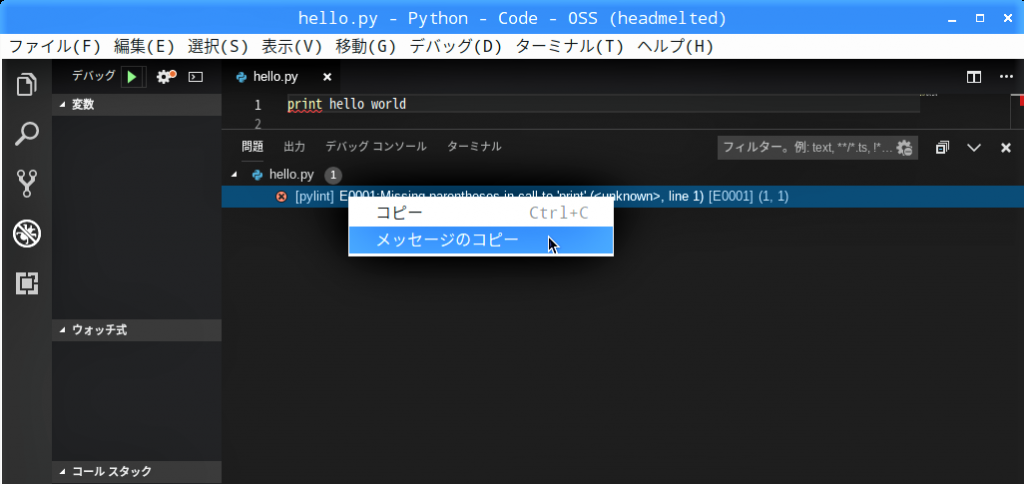
改訂【 デバッグと実行 】Visual Studio Code
前回までに日本語化とワークスペースを設定したVisual Studio Codeで、今回は実際にPythonのプログラムを作って、デバッグした上で実行してみました。
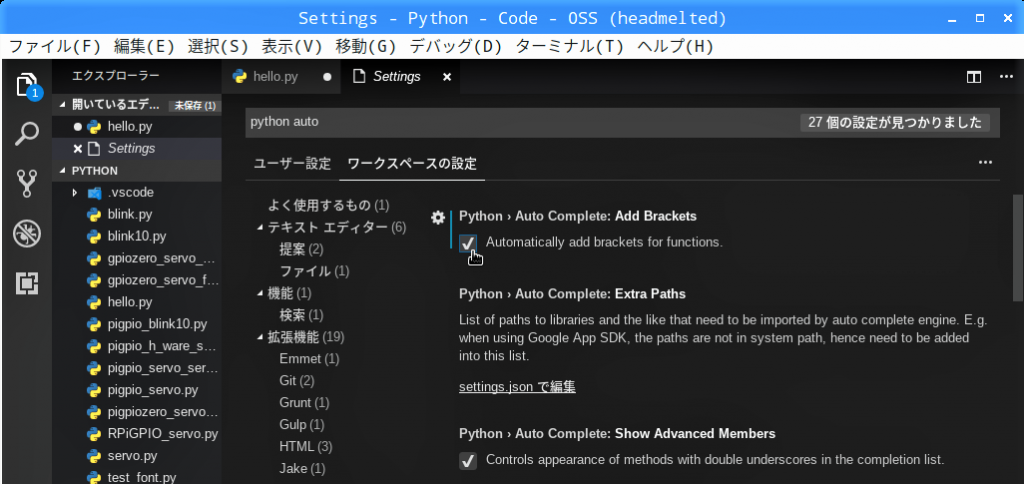
改訂【 その他の設定 】Visual Studio Code
今回は、前回の【 「よく使用するもの」の設定 】に引き続き、Pythonでのプログラミングに役立つワークスペースの設定をいくつか紹介します。
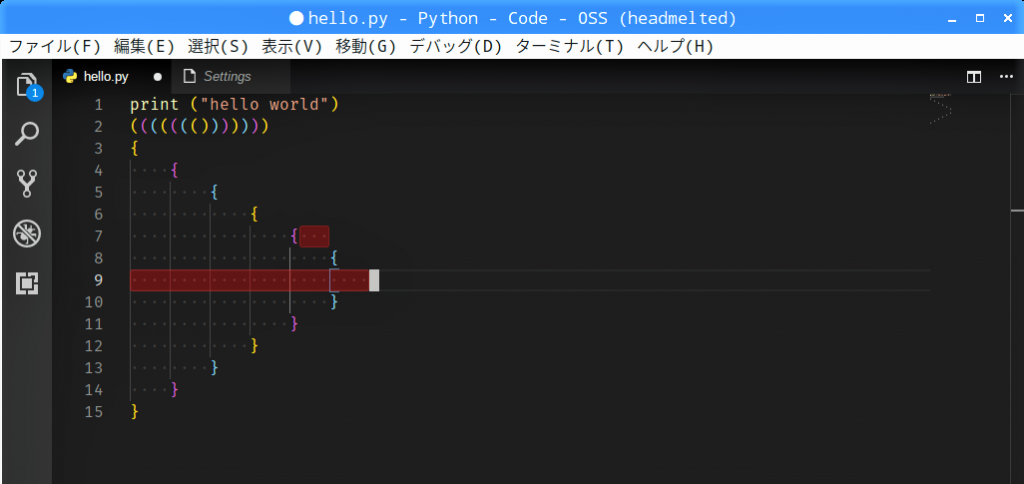
改訂【 その他のおすすめ拡張機能 】Visual Studio Code
前回紹介した”AREPL for python”以外にも、”Trailing Spaces”や”Bracket Pair Colorizer 2″など、便利な【 拡張機能 】があるので、いくつか紹介します。
改訂【 インストール編 】Raspberry PiでのプログラミングもエディターはVisual Studio Code!
Microsoftが開発した高機能エディターVisual Studio Codeがラズパイでも使えるようになりました。インストールの手順を詳細に紹介しています。
改訂【 「よく使用するもの」の設定 】Visual Studio Code
Visual Studio Codeの最新バージョン”1.29.0”では、それまでのバージョン”1.14.0″のときとは設定画面がすっかり変わってしまいました。そこで以前の記事を全面的に見直し、改めて設定方法について紹介することにしました。
Visual Studio Codeのver.1.32は、Raspbianでは未だ使えません!
設定により、Raspbianのアップグレードに伴ってcode-oss(Visual Studio Code)もver.1.32にアップグレードされることがあります。その場合、Visual Studio Codeの画面がメニューバー以外、何も表示されなくなってしまいます。このバグは他のプラットフォームでも発生していて暫定対策がありますが、残念ながらRaspbianには適応されません。RaspbianのVisual Studio Codeは、修正バージョンがリリースされるまでver.1.29のままで運用してください。
RaspbianでもSwift 5.0が利用可能に!
SwiftはApple社が開発したプログラミング言語で、主にiPhonやiPad、Macなどのアプリ開発に使われていますが、直接、デバイスを制御することが可能で、Raspberry PiのGPIOを使ってモーターなどをコントロールすることもできるそうです。
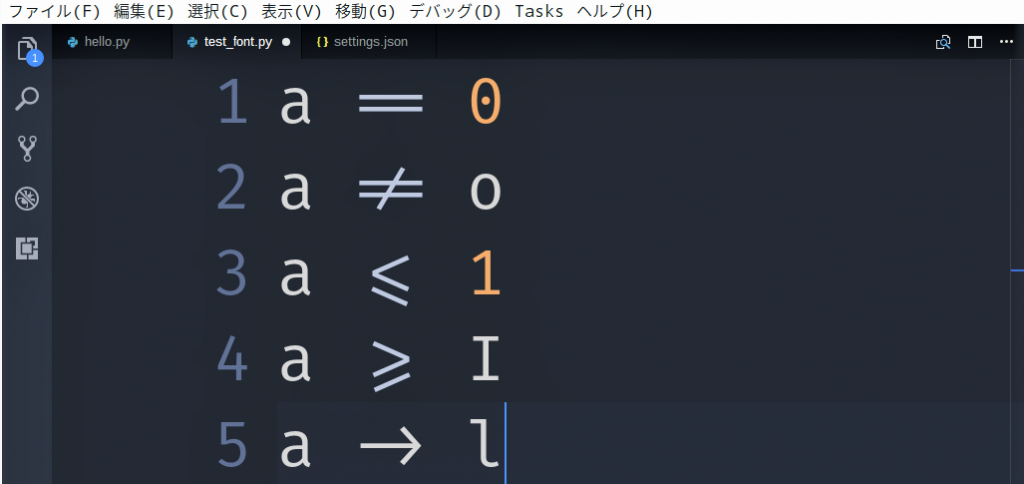
Raspberry Piでもプログラミングのフォントは、Fira Code!
プログラミングで使うフォントとして大切な英数字や記号の識別が明解で間違えにくいというFira Codeをラズパイにインストールする手順を紹介しています。
Raspberry PiでのプログラミングもエディターはVisual Studio Code!【 アップグレード編 】
直近の”update”で統合開発環境Visual Studio Codeの最新パッケージ”ver.1.28.0″が提供されるようになったのでアップグレードしてみました。
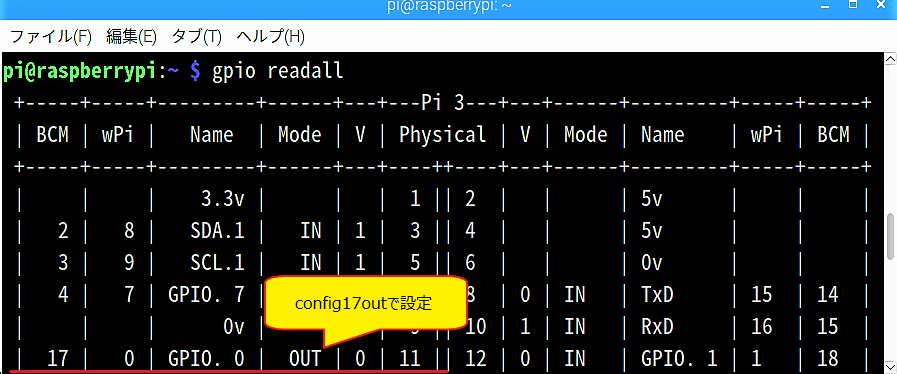
【番外編】猫に調べさせるまでもなかった!Raspberry PiのGPIO
最近のRaspbianには”WiringPi“が既にプリインストールされていて、LXTerminalで各GPIOの設定一覧表が出力できることが分かりました。
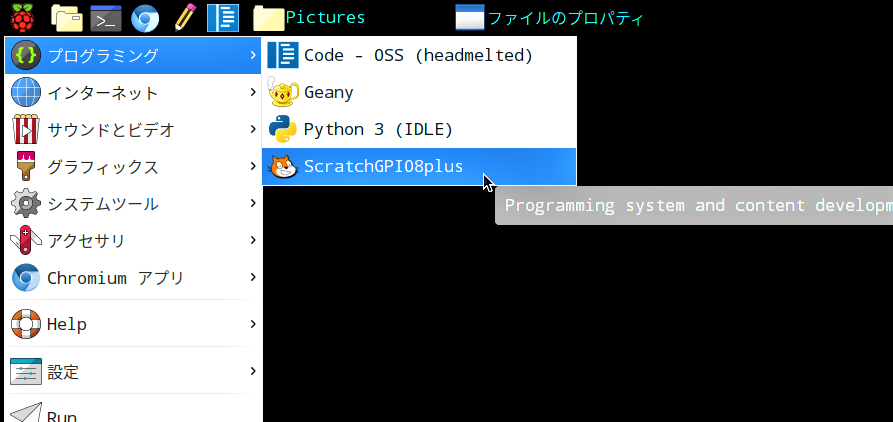
【番外編】Scratch 2の猫に、Raspberry PiのGPIOを調べさせよう!
Raspberry Piの各GPIOが既定でプルアップ/プルダウンのどちらに設定されているかを事前に「Scratch 2」の猫に調べさせることにしました。
【 第9回 】取り敢えずScratch 2でも人感センサーでon/offを確認
「Scratch 1.4」のPWM出力を使った”Lチカ”の進化を追及してきましたが、今回は一旦、「Scratch 2」に戻って、「Scratch 2」でもできることを確認してみたいと思います。
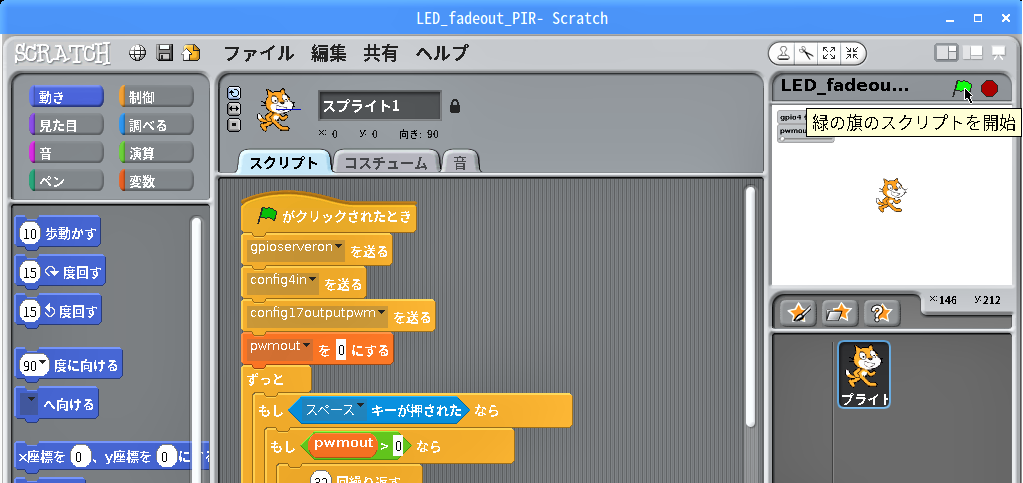
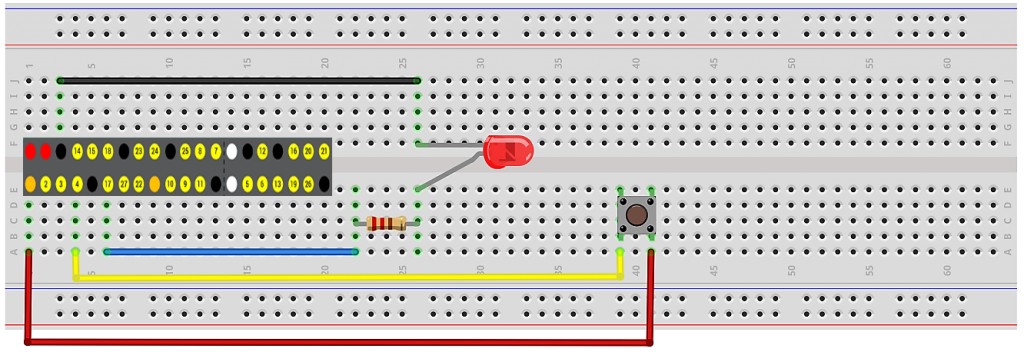
【 第8回 】LEDの輝度をフェードアウトさせて、”Lチカ蛍”を本物の蛍に!
今回はLED消灯時にフェードアウトするスクリプトを組み込んだ上で、より本物の蛍に近いスクリプトにチューニングし、”Lチカ蛍”のプロジェクトを完成させます。
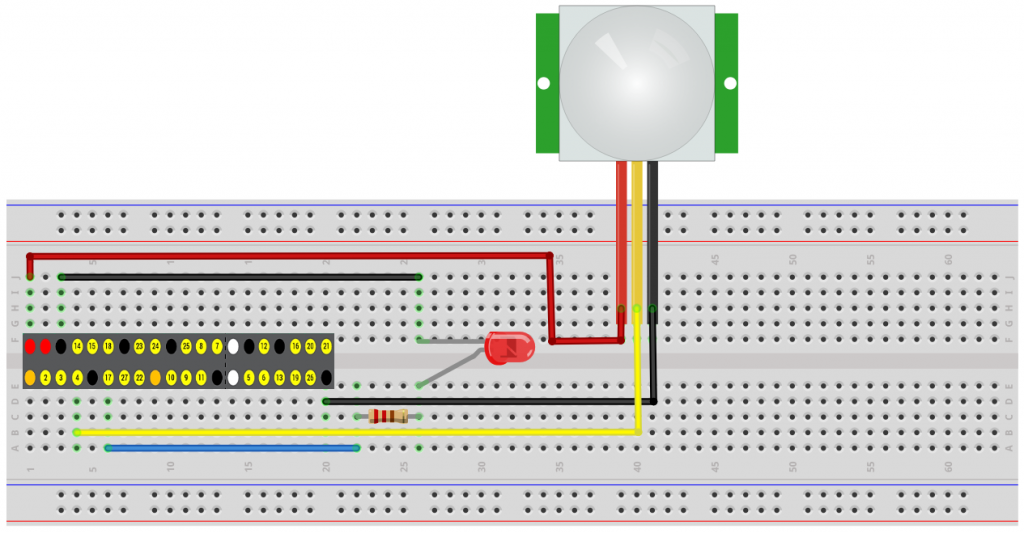
【 第7回 】人感センサーで、”Lチカ蛍”をon/off
【第6回】で、タクトスイッチで”Lチカ蛍”をon/offすることができるようになったので、タクトスイッチを人感センサーに替えれば、人が近づくと蛍が明滅するようなものが実現できるのではないかと思い試してみました。
【 第6回 】”Lチカ蛍”もタクトスイッチでon/off
【第5回】のタクトスイッチによるスクリプト制御を使って、【第4回】の”Lチカ蛍”をon/offさせてみます。
今回は、2つのスクリプトを組合わせて新たなスクリプトを組立てる手法と変数モニターの操作に注目してください。
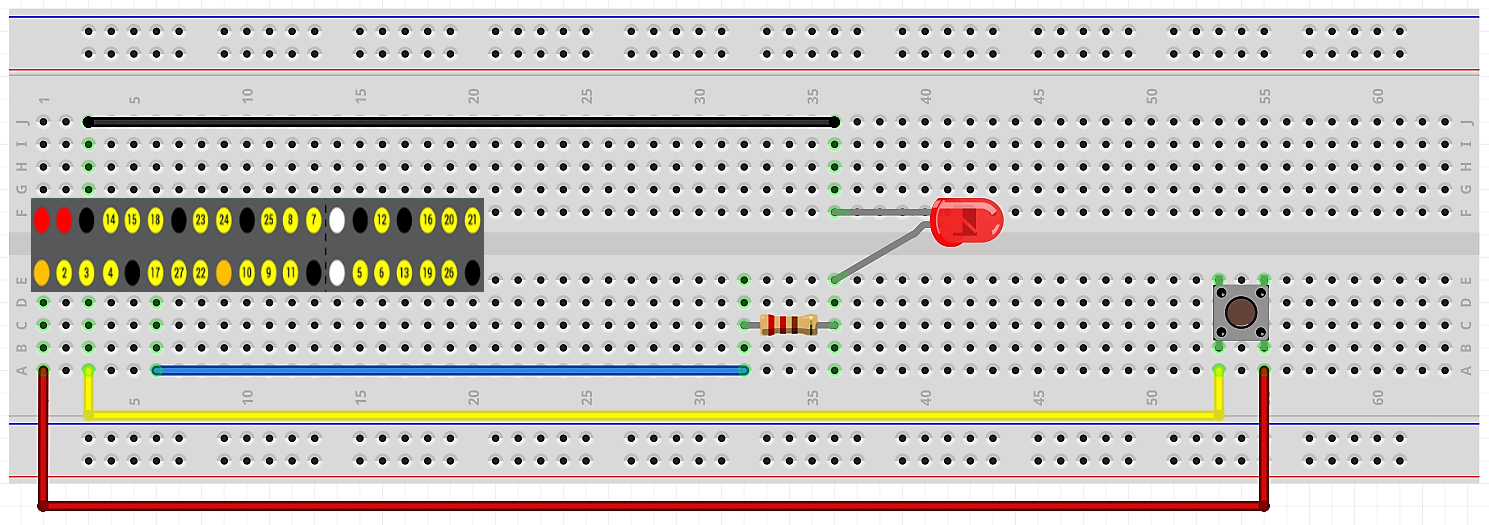
【 第5回 】タクトスイッチでも、LEDをon/off
今回は、外部デバイスからの入力でScratchのスクリプトを制御する最もシンプルな事例として、タクトスイッチによるLEDのon/off制御を紹介します。
【 第4回 】Scratch 1.4のGPIOサーバーなら、Lチカも蛍に!
以前のバージョン「Scratch 1.4」のGPIOサーバーにはPWM出力の機能があるので、今回はそれで”蛍のようなLチカ”を実現することにしました。
【 第46回 】Scratch2GPIOでもサーボモーターをフルスイング!
Scratch 2はPWM出力をサポートしていないので、サーボモーターの制御はScratch 1.4でしかできないと思っていましたが、別途、Scratch2GPIOというものをインストールすれば、Scratch 2でもサーボモーターが制御できることを最近、知りました。早速、インストールしてみたので紹介します。
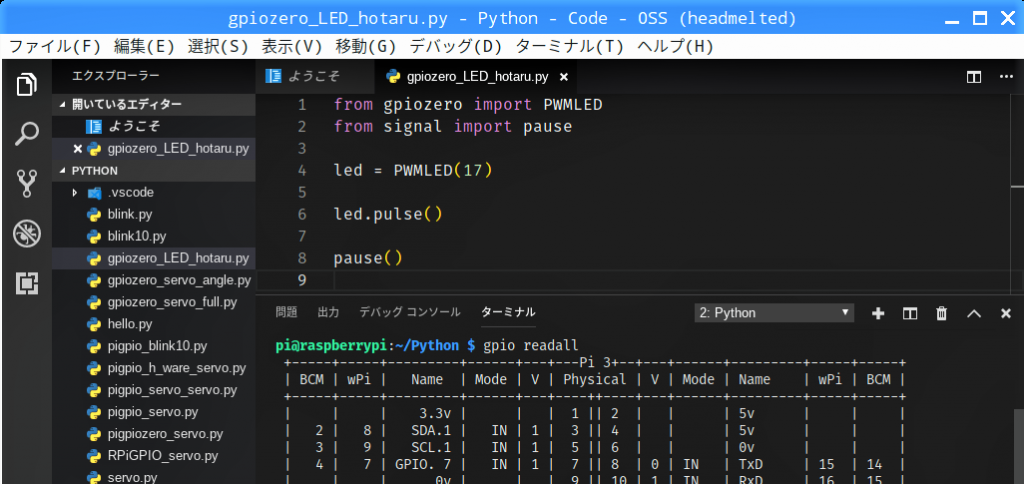
【 第45回 】パラメーターを変更して、Lチカ蛍をもっとリアルに!
前回の記事「【 第44回 】Gpiozeroの関数PWMLEDなら、Lチカ蛍もこんなに簡単!」では、制御ライブラリGpiozeroの関数PWMLEDを使ってLチカ蛍を実行してみましたが、2秒毎に明滅するLEDは蛍に見えないことはないのですが、いまいちリアルさが欠けていました。そこで今回はPWMLEDのパラメーターを操作して、より本物の蛍に近づけてみようと思います。
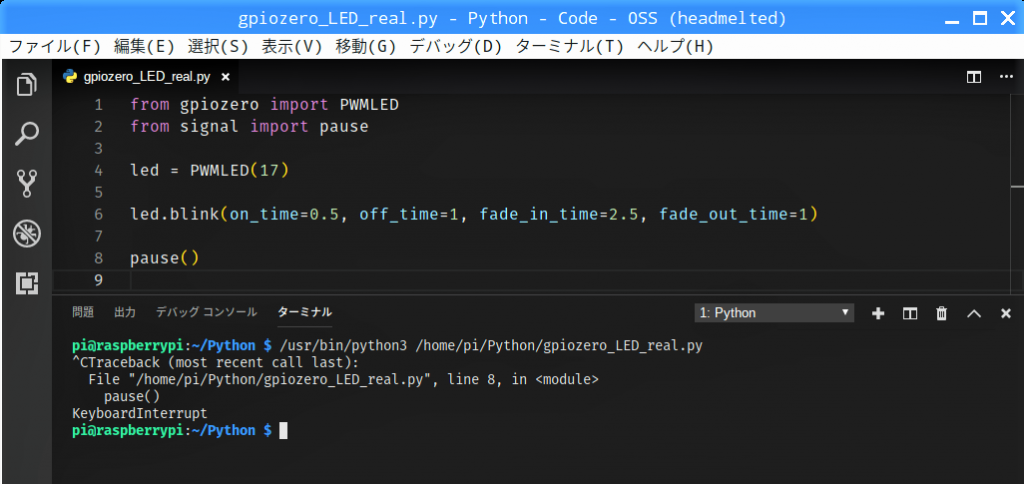
【 第44回 】Gpiozeroの関数PWMLEDなら、Lチカ蛍もこんなに簡単!
以前の記事「【 第8回 】LEDの輝度をフェードアウトさせて、”Lチカ蛍”を本物の蛍に!」で、Scratch 1.4を使って”Lチカ蛍”を実行したのですが、制御ライブラリGpiozeroの関数PWMLEDを使えばもっと簡単に”Lチカ蛍”が実現できそうなので試してみました。
【 第43回 】ScratchGPIOならサーバーの起動は不要
前回の【 第42回 】で、Scratch1.4のGPIOサーバーでハマったときに怪我の功名でScratchGPIOというものがあることを知りました。このソフトウェアには様々な入出力機器用の制御ライブラリが含まれていて今後も使えそうなのでインストールしてみました。
【 第42回 】Scratch1.4の追加インストールは、Recommended Softwareから
公式サイトによると、「Raspberry Pi用のScratch 3の作成は、2段階のプロセスで行われます。まず、Scratch 3を最適化してMITをサポートし、さまざまなデバイスで最高のパフォーマンスを実現できるようにします。作業が完了したら、Raspberry Pi用のScratch 3のオフラインビルドを作成します。これには、GPIOピンとSense HAT用の新しい拡張機能も含まれます。今後数カ月以内にこの件に関するより多くの情報が発表される・・・」とのことなので、現時点でScratchからGPIOを制御する為には、まだScratch 1.4が欠かせないもののようです。ところが、「【 速報 】配布バージョン”2018-11-13″のRaspbianは3種類!」でお知らせしたように、”RECOMMENDED SOFTWARE”なしのRASPBIAN STRETCH WITH DESKTOPには、Scratch 1.4がプリインストールされていません。そこで、今回は追加でScratch 1.4をインストールする方法を紹介します。
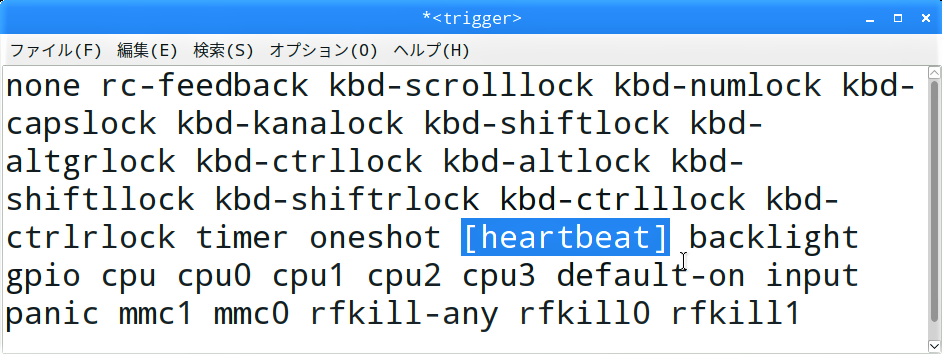
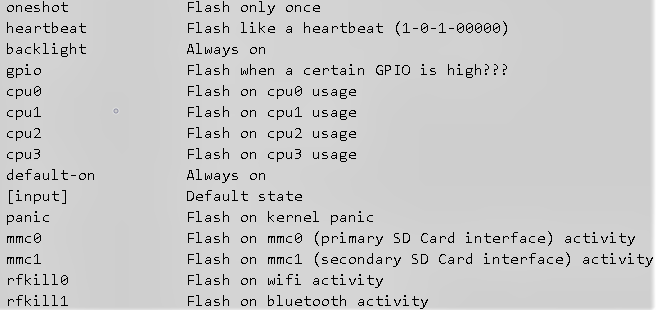
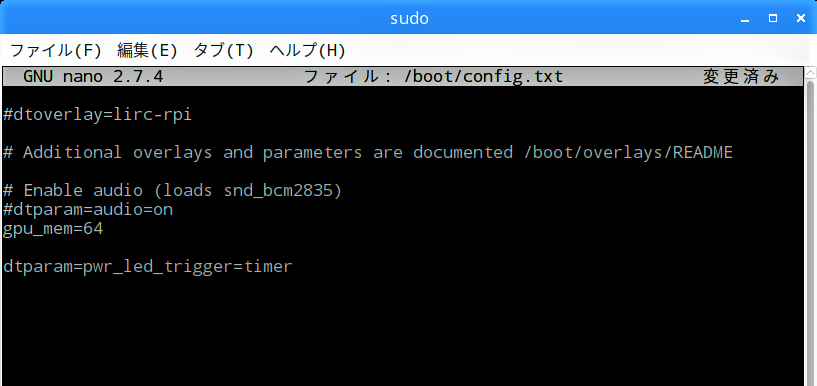
【 第41回 】Raspberry Piのデバイスツリーを参照する
Raspberry Piには、搭載されたハードウェアの制御様式を記述したデバイスツリーというものがあります。今回は、この”デバイスツリー”のリストが書かれたファイルから、実際にデバイスが制御される仕組みの一端をを見てみました。
【 第3回 】拡張機能”Pi GPIO”で、Lピカをキー操作でon/off
前回は、Raspberry Pi上の電源 ( 3.3VとGND ) を使って”Lピカ”させただけでしたが、今回は、拡張機能”Pi GPIO”を追加した「Scratch 2」のプロジェクト ( プログラム ) で”Lピカ”を実行してみます。
【 第39回 】1番簡単なLED不要のLチカ
“LED不要のLチカ!”は、以前の記事「【 第27回 】Raspberry PiでもLED不要のLチカ!」でも紹介しましたが、もっと簡単にできる方法が分かりました。
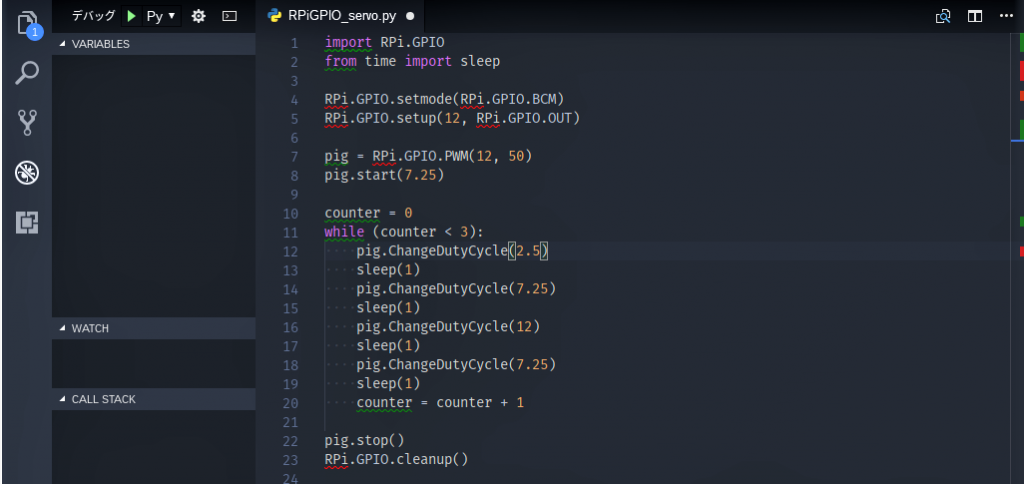
【 第37回 】遅ればせながらRPi.GPIOでもサーボモーターをフルスイング!
今回はGPIO制御ライブラリ”RPi.GPIO”のPWM関数”RPi.GPIO.PWM”を使ってサーボモーターをフルスイングをさせる手順を詳細に説明しています。
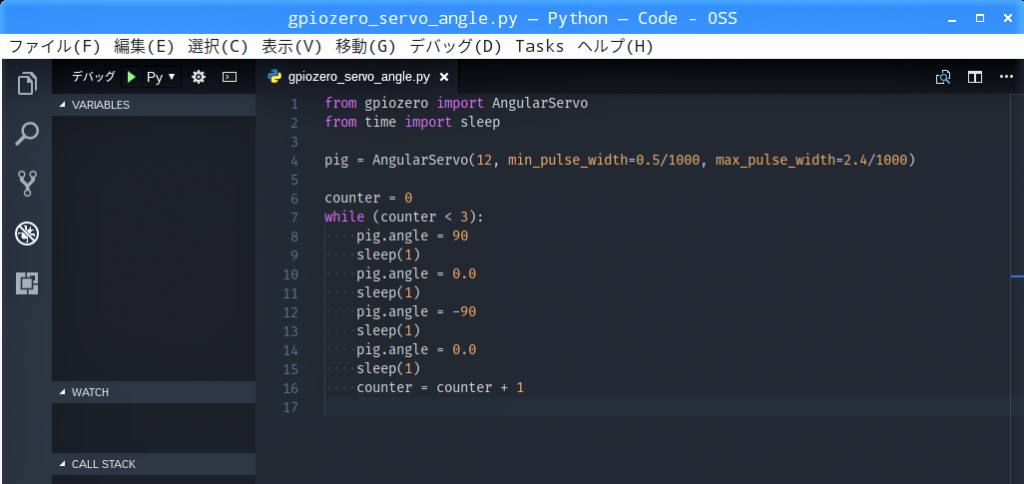
【 第36回 】Gpiozeroならサーボモーターの回転を角度で指定できるゾ!
GPIO制御ライブラリ”Gpiozero”にはサーボモーターの回転を任意の角度で指定する関数”AngularServo”もあるので、今回はこの関数を使って180°のフルスイングをさせる手順を詳細に説明しています。
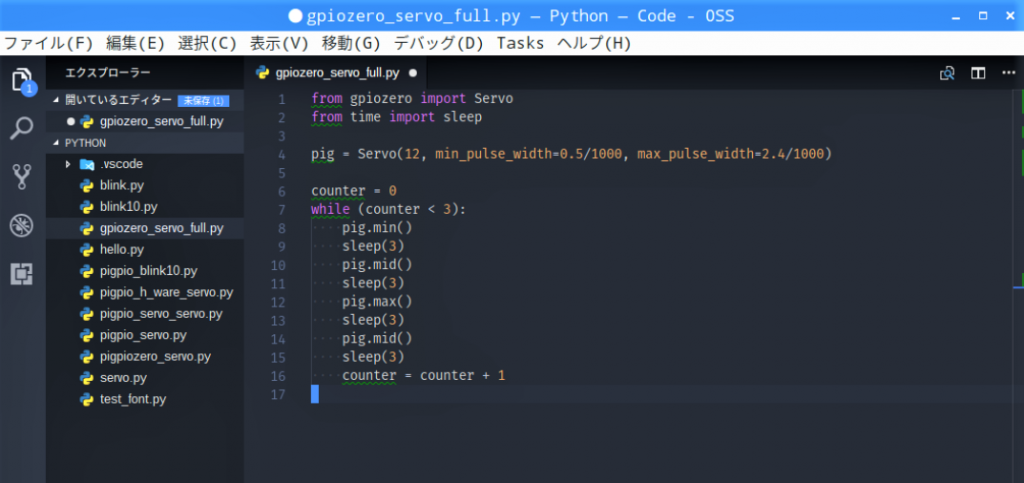
【 第35回 】Gpiozeroでもサーボモーターを180°のフルスイング!
既定のままではスイングの中央(mid)から時計方向に45°、反時計方向に45°しか回転し
なかったGPIO制御ライブラリ”Gpiozero”ですが、パラメーターを指定することで180°回転させることもできるようになります。今回はその手順を詳細に解説しました。